Profile
藤山 優太
ロボコン歴10年以上のロボットエンジニアです。
製作物
RoboCup Junior Soccer 2013 - 2017
RoboCup Junior 2017
サッカー オープンにチーム「CIAO Tezukayama」として出場しました。3D CADを用いた本格的な機体設計ができるようになり、全ての機械部品をCNCで自作しました。プリント基板を設計するために、回路CADが扱えるようになりました。Arduino as ISPを用いた、親マイコンを経由した子マイコンへのファームウェアの書き込みシステムを開発しました。
全国大会 10位
RoboCup Junior 2016
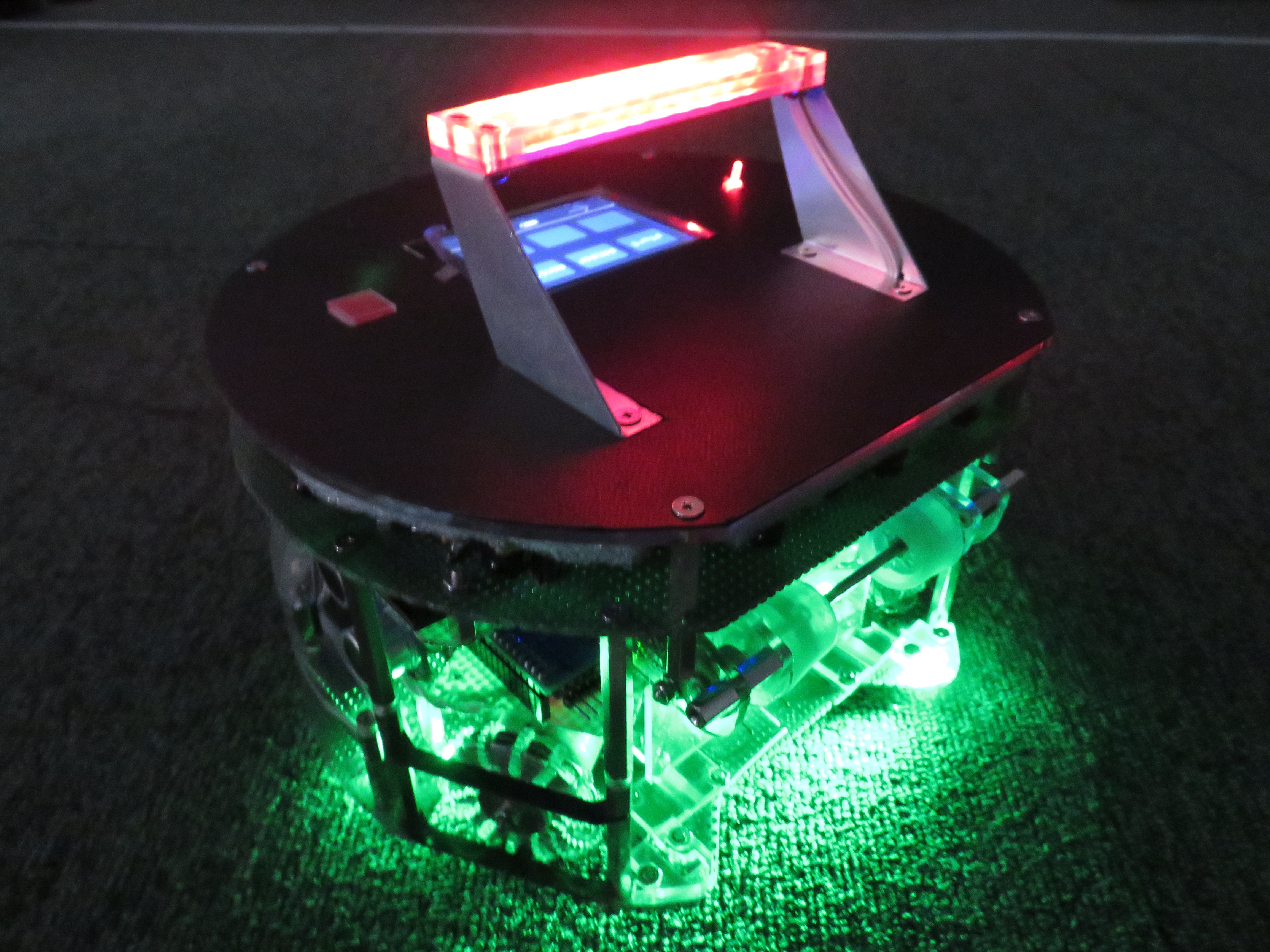
サッカー オープンにチーム「CIAO Tezukayama」として出場しました。低コストで自作したセンサーをたくさん搭載しました。キッカーやドリブラーを作るために、2D CADを用いた機械部品の設計やCNCでの加工ができるようになりました。タッチディスプレイを搭載し、ロボット単体でセンサー値を見ることができるUIを作成しました。
全国大会出場
RoboCup Junior 2015
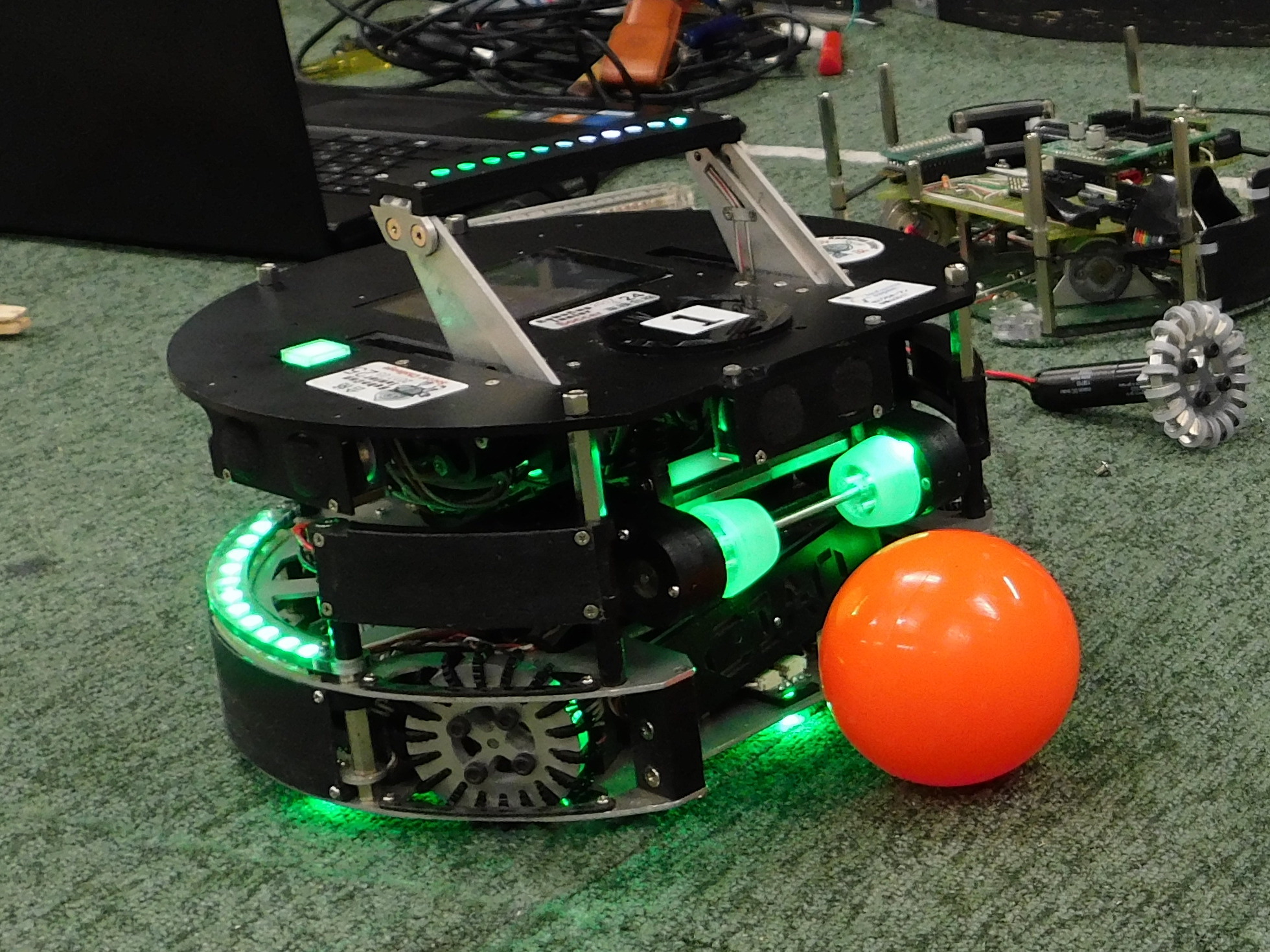
サッカー オープンに出場しました。マイコンにArduinoを使い始めました。センサーやモータードライバはダイセン製のものを使いながら、それらを繋げる配線や機械部品を自作しました。
京滋奈ブロック大会 4位
RoboCup Junior 2014
サッカーA ライトウェイト プライマリに出場しました。オムニホイールを導入し、全方向移動ができるようになりました。
関西ブロック大会出場
RoboCup Junior 2013
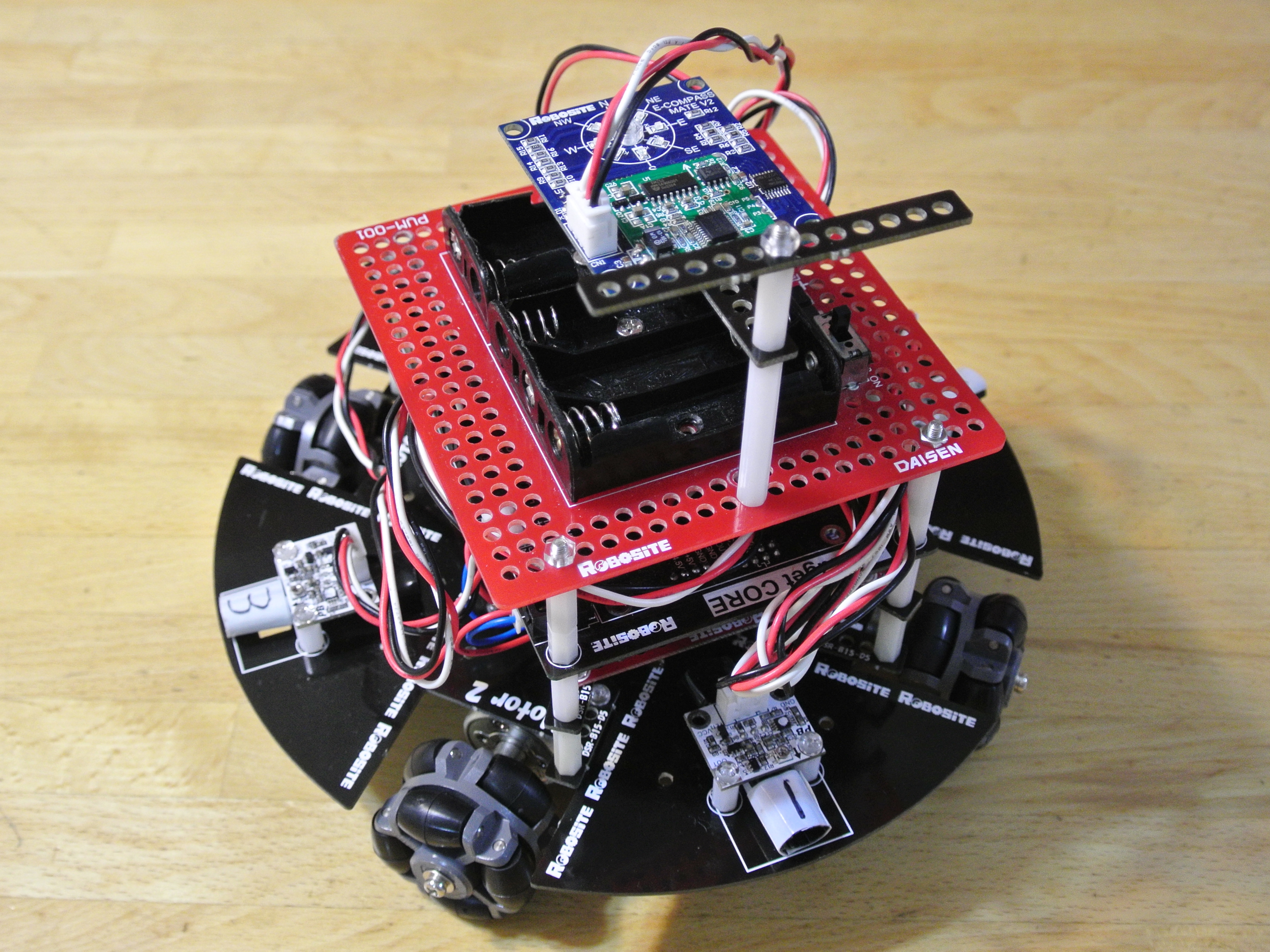
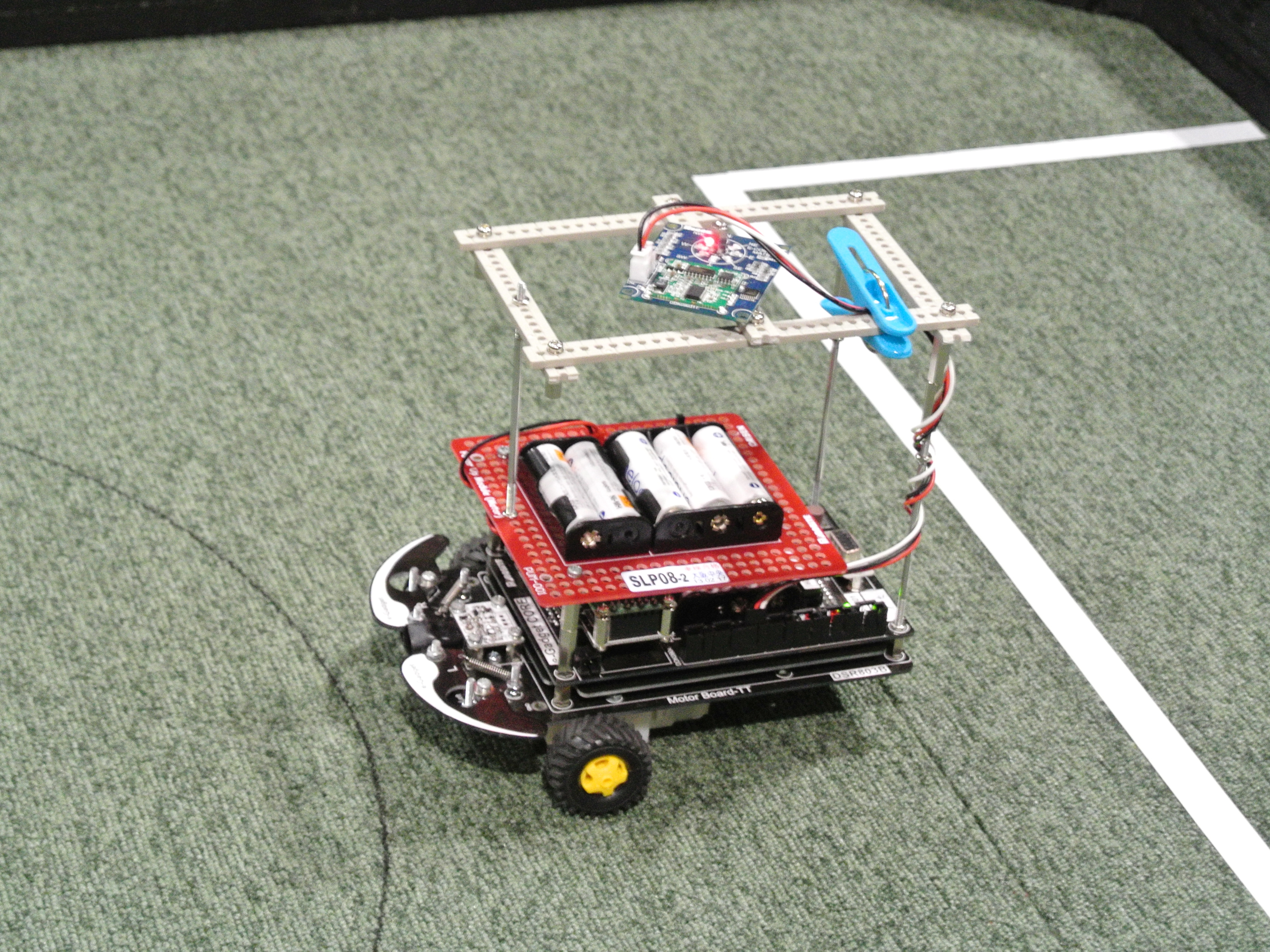
サッカーA ライトウェイト プライマリに出場しました。初めてのサッカーロボットを作った年でした。ダイセン電子工業製のサッカーロボット「e-Gadget」を改良しました。
関西ブロック大会出場
WRO football 2018

右2台のロボットをチームで製作しました。ハードウェアとソフトウェアをそれぞれ部分的に担当しました。LEGOで製作した4輪オムニホイールのロボットでサッカーの試合をします。RoboCup Junior Soccerで培った技術をLEGOに応用して日本大会で優勝し、日本代表として世界大会に出場しました。
世界大会 Best 16
RoboCup Junior Soccer 2018

サッカー オープンにチーム「CIAO Tezukayama」として出場しました。これまでの1人でロボット1台をを作る開発体制を一新し、メンバーそれぞれが得意分野を担当する開発体制を導入しました。ハードウェア開発と組み込みソフトウェアの実装、チームリーダーを担当しました。自作の全方位カメラを用いたボールとゴールの認識を新たに開発しました。
世界大会 SuperTeam優勝、Best Innovation Award受賞
大会初のチップキックを開発しました。チップキックは人間でいう、つま先でボールを蹴り上げるようなキックです。

このロボットの内部構造をブログで紹介しました。各機構を分解して要素技術を解説しています。
Go BlogRoboCup Junior Soccer 2019
サッカー オープンにチーム「CIAO Tezukayama」として出場しました。オフェンスロボットのハードウェアとソフトウェア全レイヤー、ディフェンスロボットのハードウェアと組み込みソフトウェア、そしてチームリーダーを担当しました。メインMCUに新たにSTM32を導入し、高周波数での制御や繊細なディスプレイグラフィックスを実現しました。大会発のマルチアングルキッカーを開発し、ロボットの姿勢を傾けることなく狙った方向へのキックができるようになりました。
全国大会 3位、ベストプレゼンテーション賞 受賞
Go Blog 大会結果報告
全方位カメラに加えて簡易的なLiDARを搭載しています。キーパーロボットを認識し、避けてゴールへキックします。ロボット後方にも搭載したドリブラーを用いて、キーパーロボットから見ると突然目の前にボールが現れるように見える、魔法のようなシュートを実装しました。

オフェンスロボットの内部構造をブログで紹介しました。
Go Blog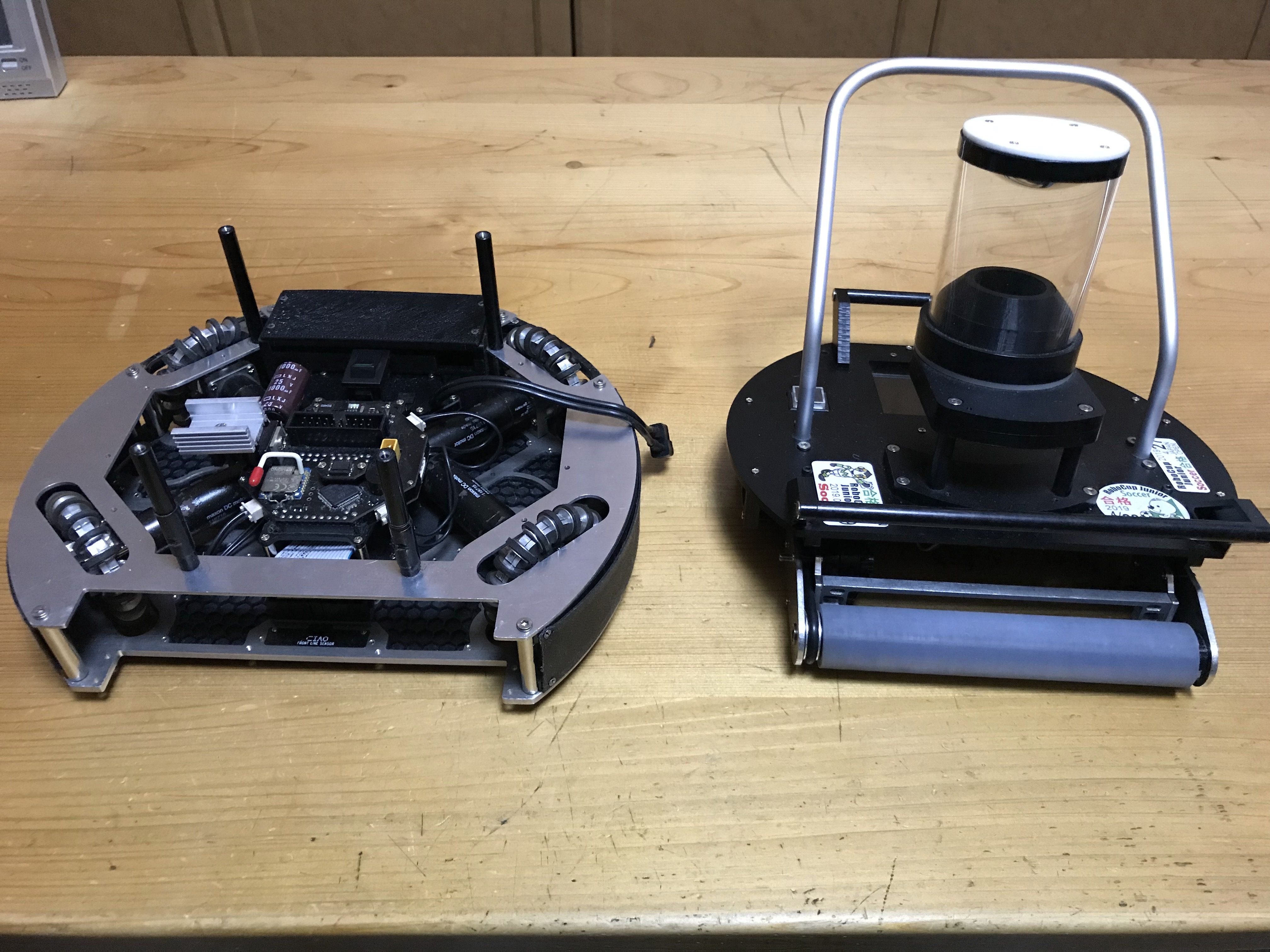
ディフェンスロボットの内部構造をブログで紹介しました。
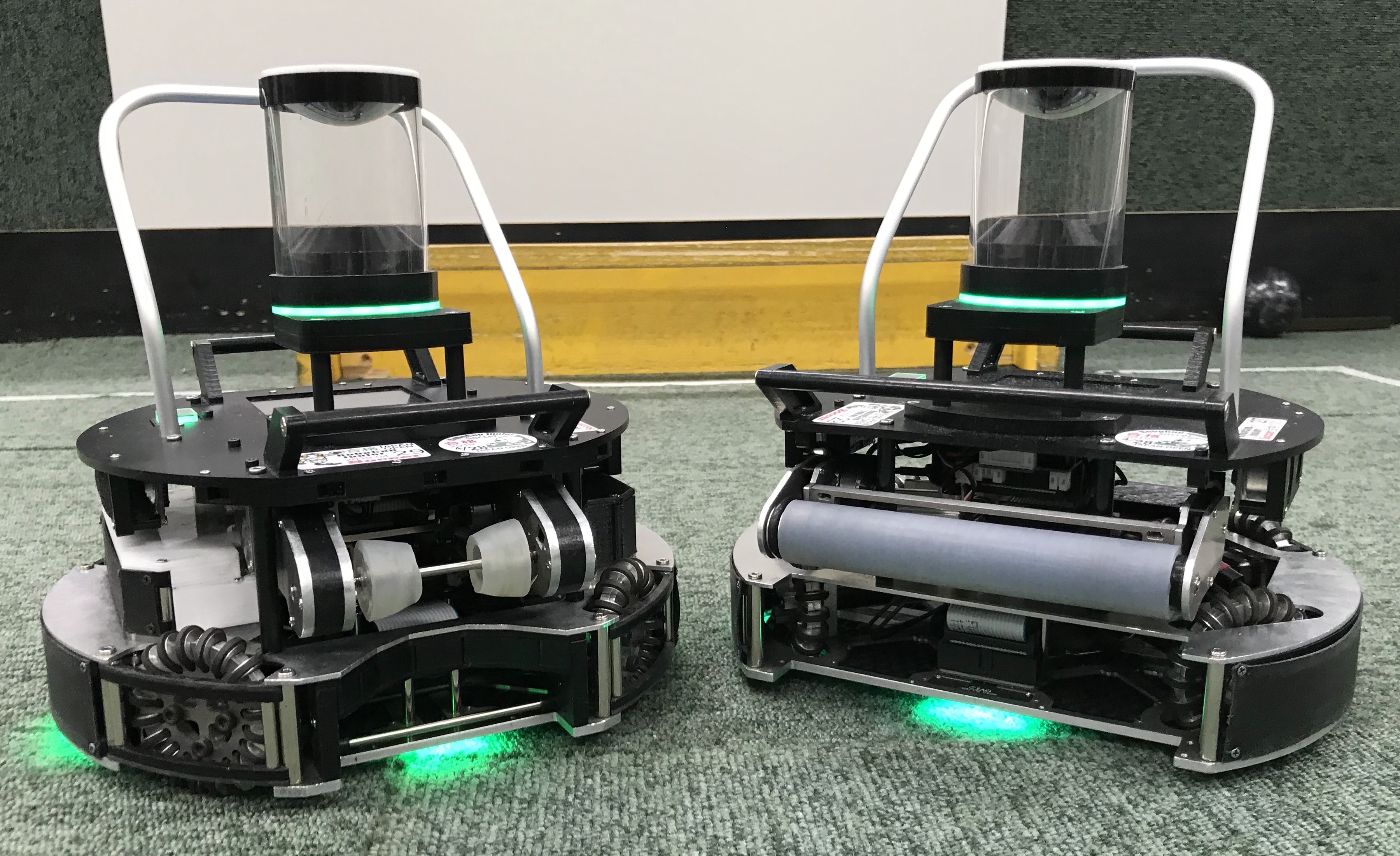
Go BlogRoboCup Junior Soccer 2021
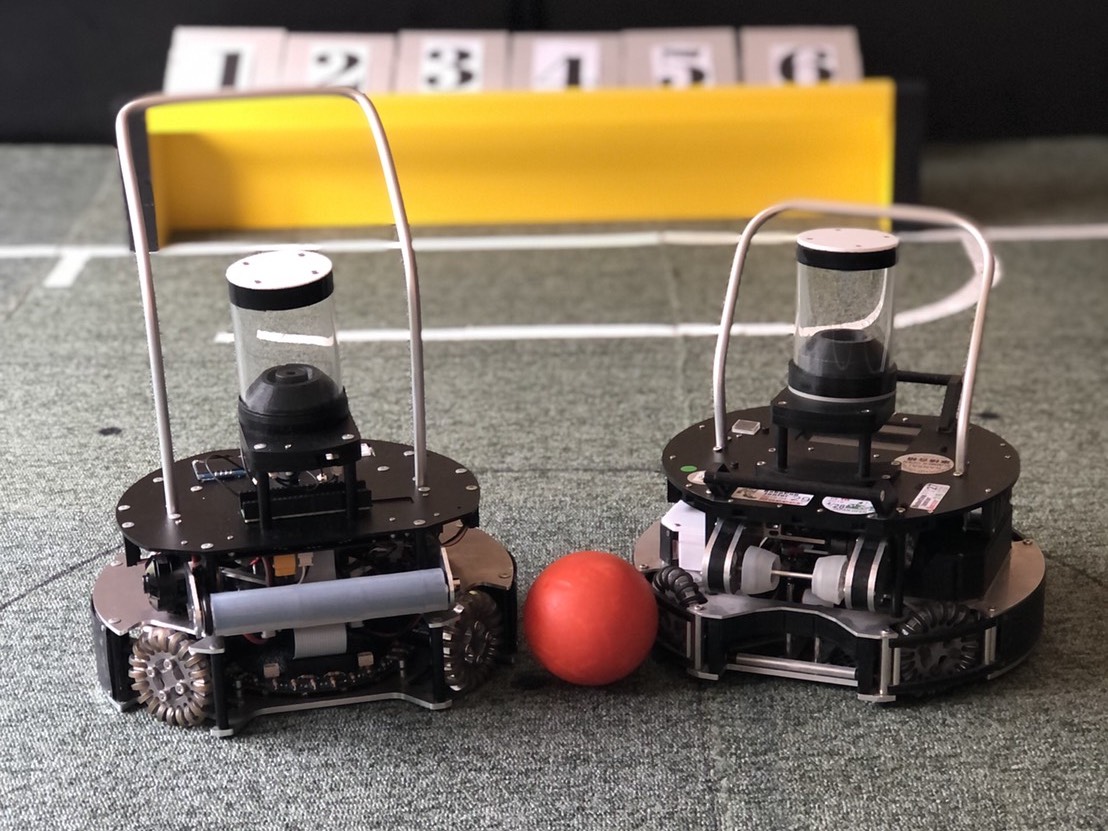
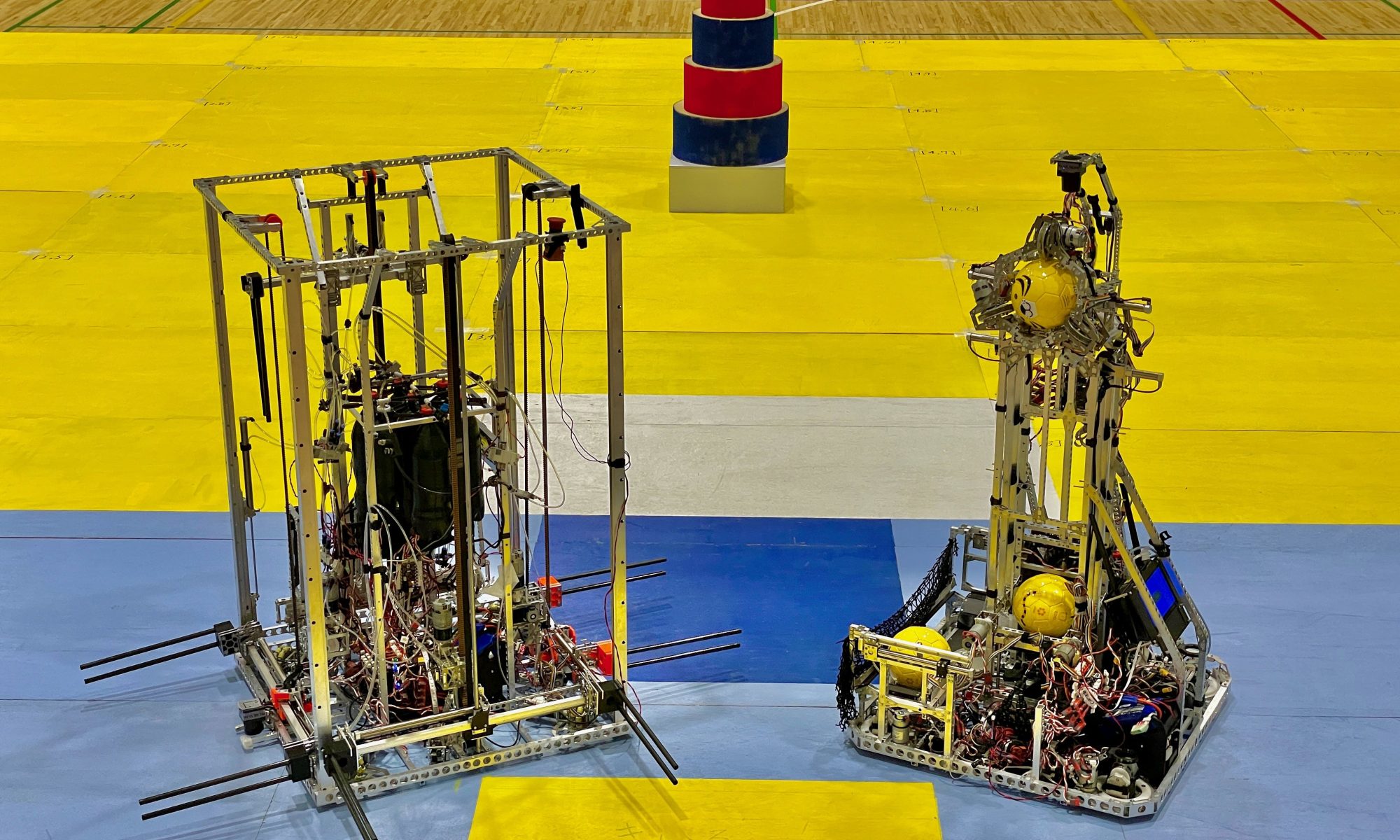
サッカー オープンにチーム「Leopard」として出場しました。写真右のオフェンスロボットを担当しました。2019年の機体のメカを使い回し、ほとんどの回路は再設計しました。制御ソフトウェアは2019年に実装したものからさらに拡張し、完成度向上を最優先しました。
世界大会 優勝、SuperTeam 優勝
Go Blog 大会結果報告世界大会での評価対象となるVideoです。大会に向けてチームが開発してきた技術について紹介することが求められます。
動画の作成全般を担当しました。
2022年度の東工大学生リーダーシップ賞を受賞しました。チームリーダーとしてこの大会で好成績を収めたことが評価されました。
選考時に、これまでの活動とロボカップ世界大会優勝に向けた取り組みについてプレゼンを行いました。
View Slide Go News
ロボカップ世界大会優勝について、東工大ニュースに掲載されました
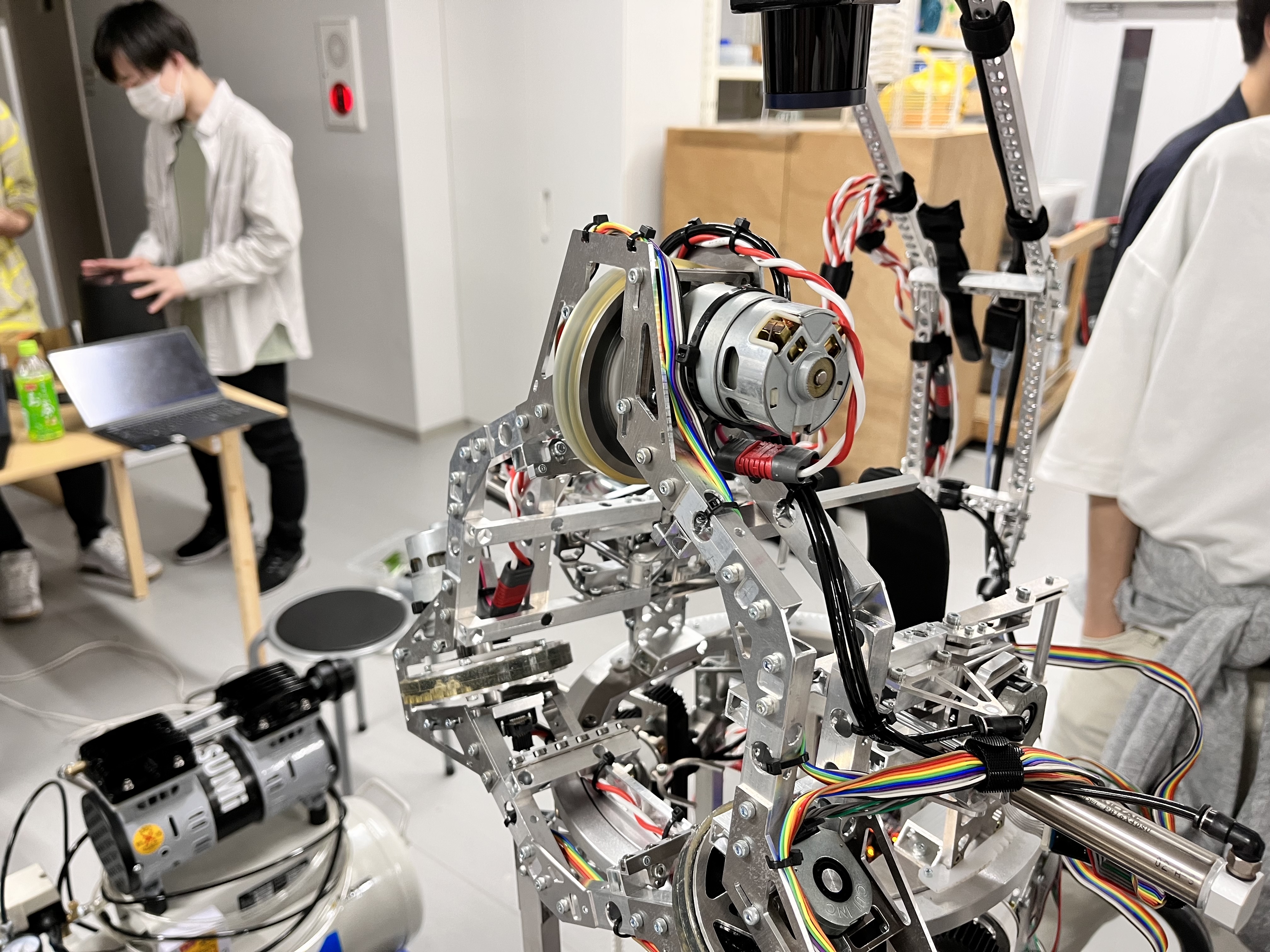
Go NewsNHK学生ロボコン 2021
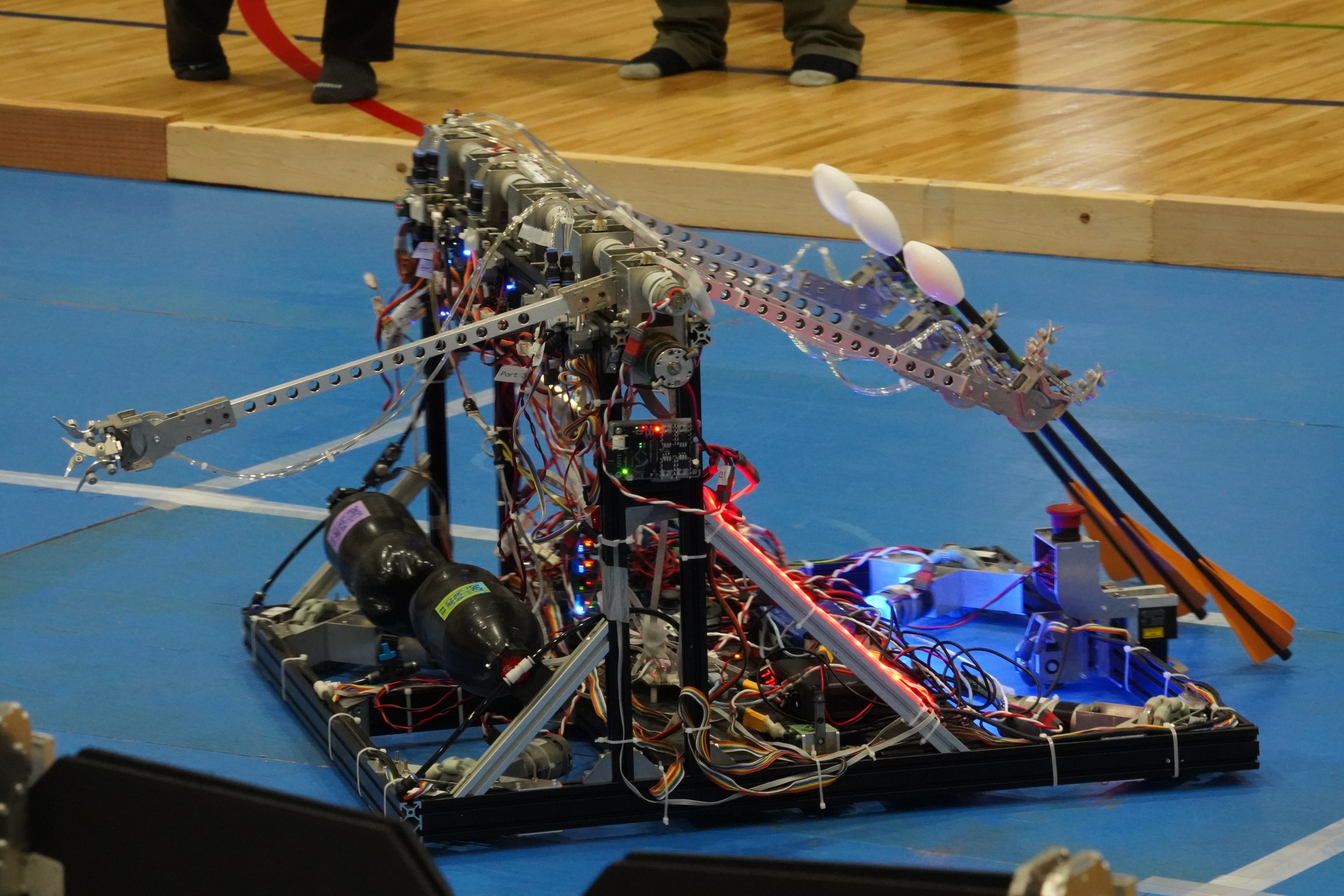

開発メンバーの一人として、防御壁の機械設計と特殊全方位カメラによるオブジェクトの色認識を担当しました。
予選出場
全方位カメラでの色認識

全方位カメラの自作ミラー
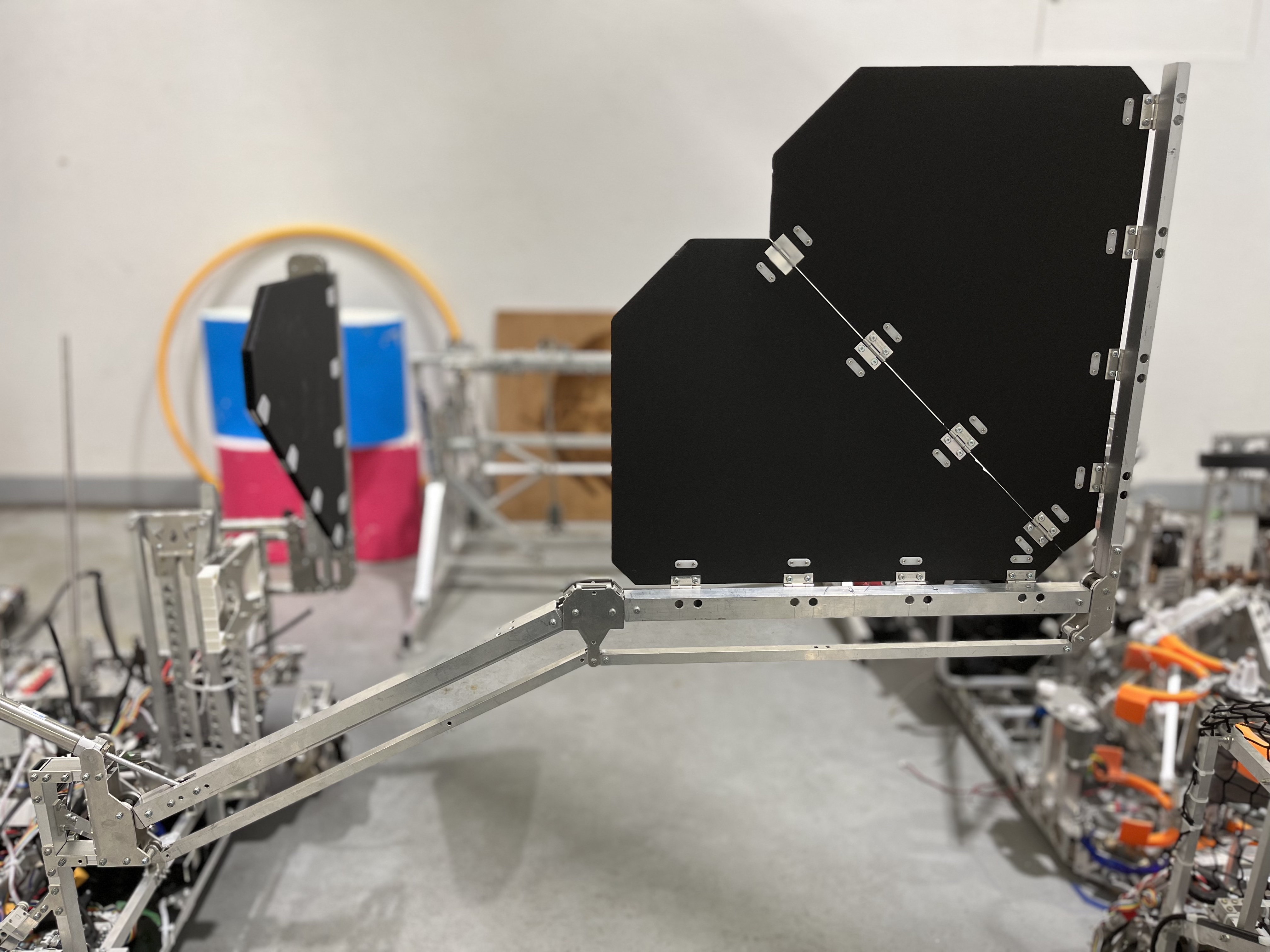
壁機構を展開したところ
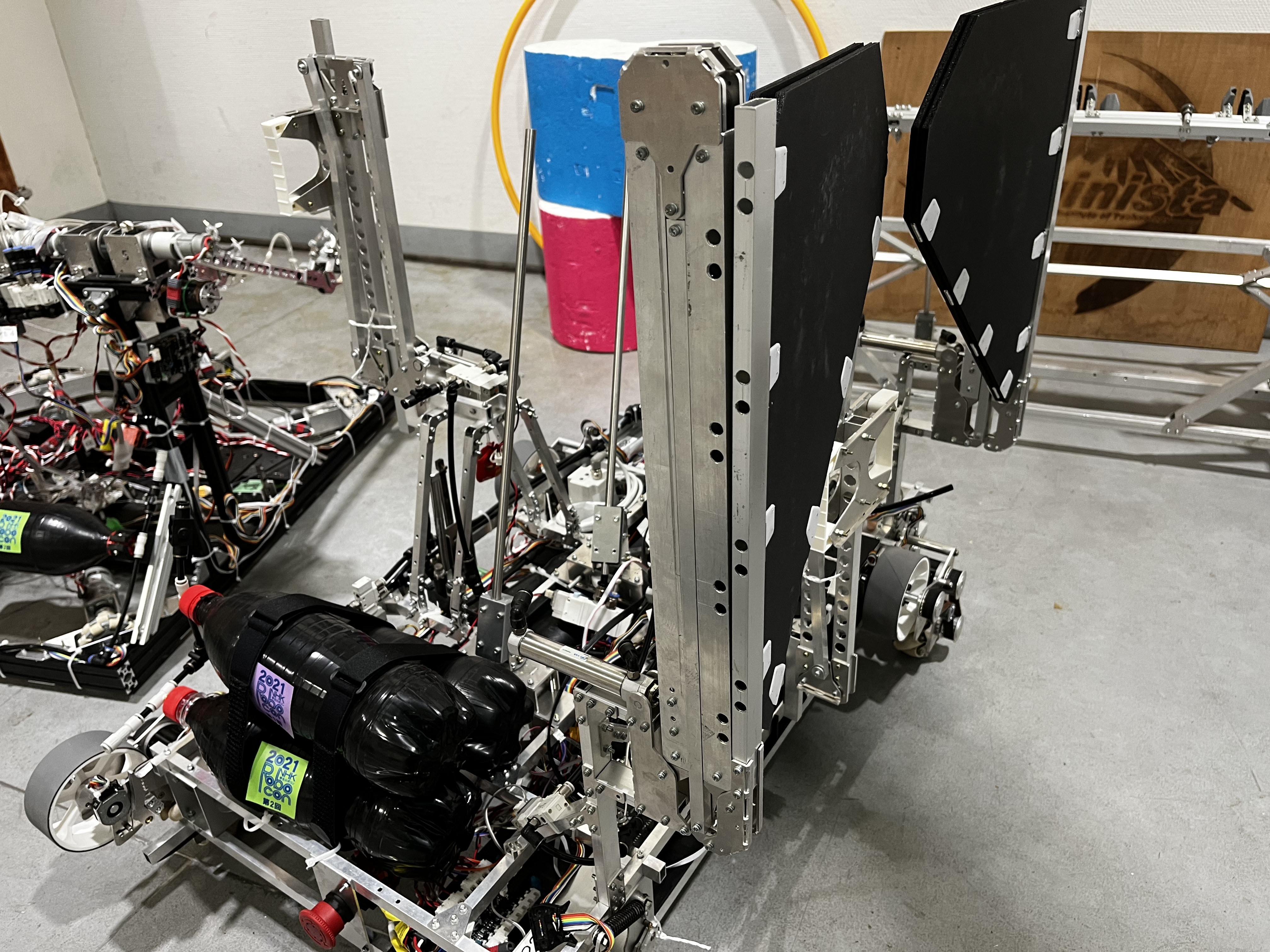
壁機構を格納したところ
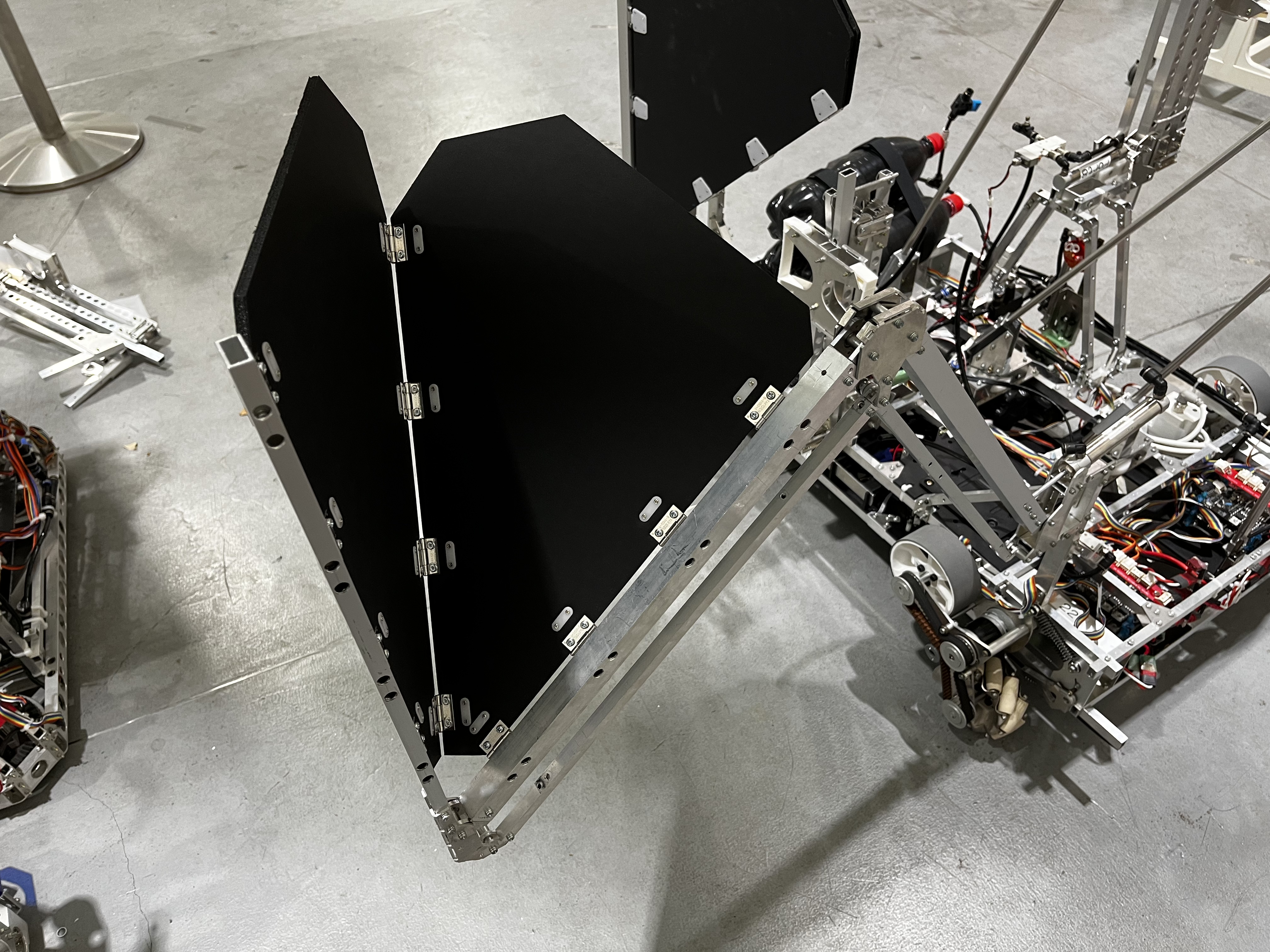
壁機構を展開中

壁機構をアクチュエータ周辺
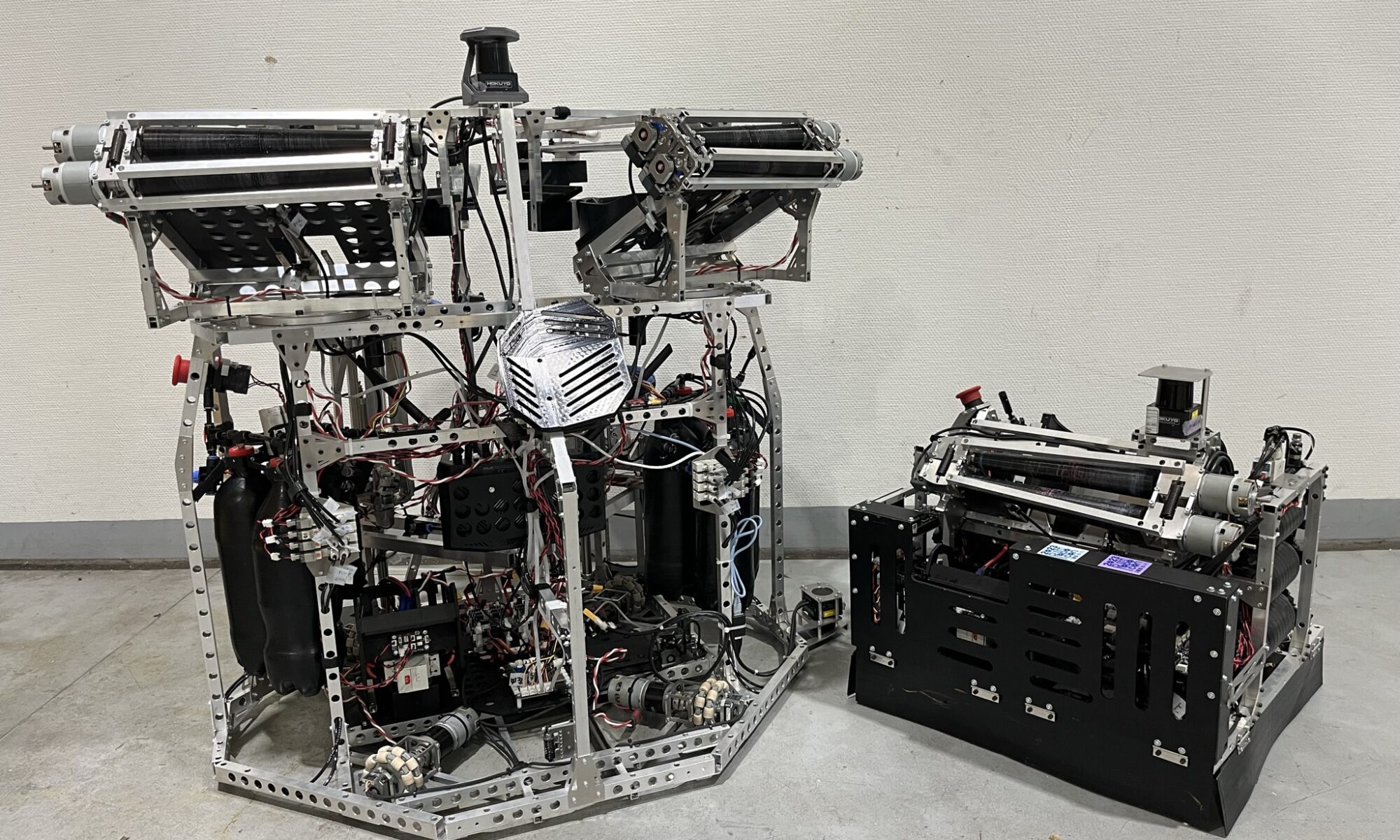
NHK学生ロボコン 2022
機械班リーダーとして機械領域のマネジメントと新しいツールの導入、機械領域の技術開発、画像右のロボットの設計を担当しました。また、制御領域のタスクの一部も担当しました。
動画審査 不合格
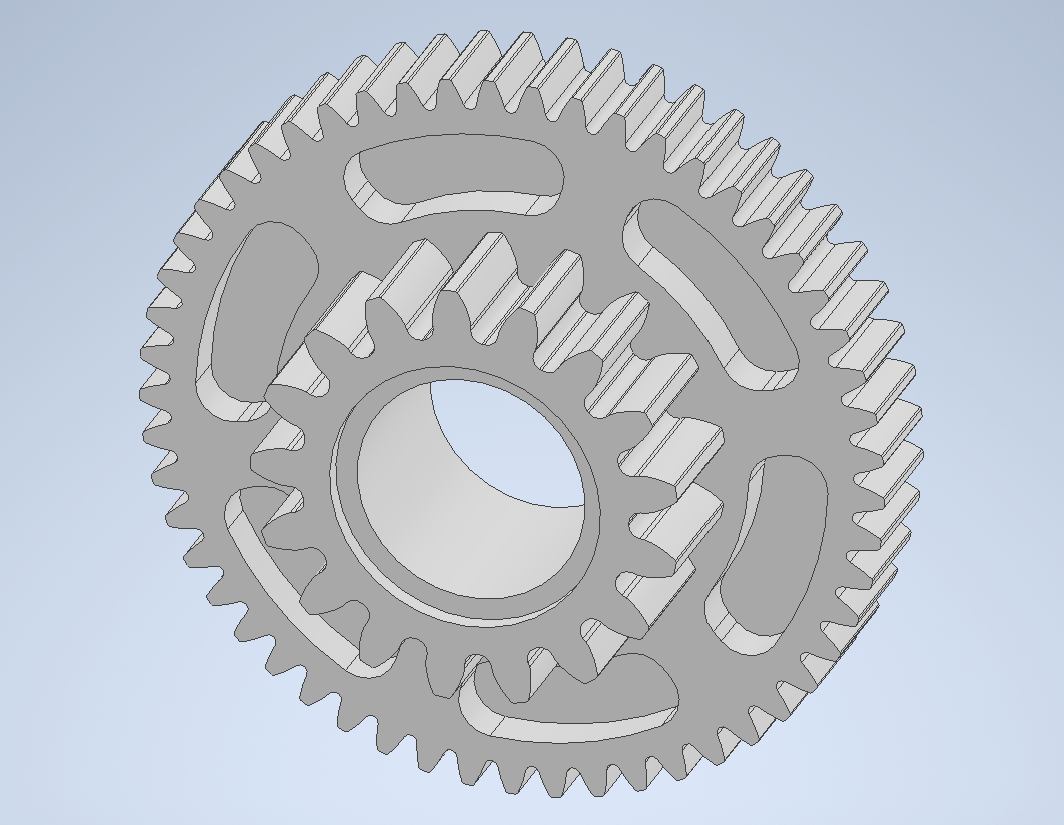
インボリュート歯車のモデリング
高効率な自作歯車を作るために、インボリュート歯車の形状とモデリング方法を勉強・考案しました。CADの機能で生成できる歯車とは違い正確なインボリュート曲線を描くので、モデルをそのまま出力することで高精度な噛み合わせが実現できます。ブログに詳細な内容をまとめました。
Go Blog
歯車の切削による加工
最も都合の良い寸法の歯車を短納期かつ低コストで入手するために、歯車の自作に挑戦しました。高精度に歯車を切削するために試行錯誤しました。得た知見をブログにまとめました。
Go Blog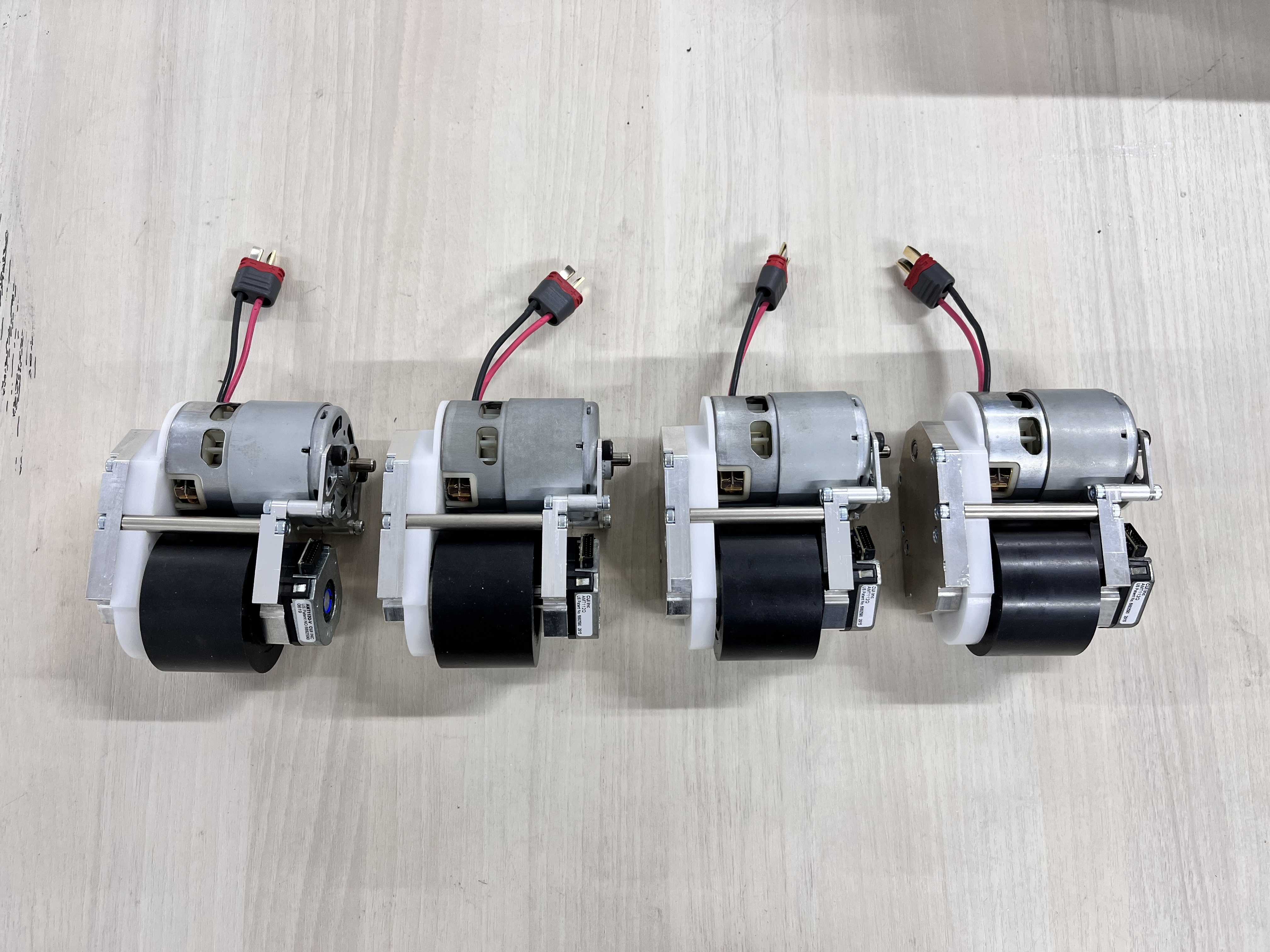
独立四輪ステアリングホイール
ロボットの走行の高速化を目指して独立四輪ステアリングホイールを製作しました。独立四輪ステアリングホイールは全てのホイールが進行方向を向くように回転できるようになっており、最も速い走行速度を達成できる機構の一つです。
ボール射出ローラー
ボールをローラーで挟み込んで射出します。軽量化のために減速機を樹脂で自作しました。出力軸に内歯車を用いることで小型化しました。
2次元LiDARを用いた円筒検出と追従
2次元LiDARを用いて円筒を検出し、常に射出機構が円筒の方向を向くように制御しました。円筒の検出は円筒が存在する可能性があるエリアの点群を抽出し、その平均座標を円筒の中心としました。検出した円筒の方向に対して射出機構が追従するように、目標位置に対して入力電流を計算する純粋なPD制御器を実装しました。
NHK学生ロボコン 2023
会計担当としてチームの金銭の管理と資金調達の一部を担当しました。また、回路班リーダーとして新しい回路の開発や既存の基板・制御ライブラリのバグ修正と機能追加を担当しました。
予選出場
モータのフィードバック制御基板
既製品のモータドライバからモータの回転数を受け取り目標電流値を指令する基板の回路設計、ファームウェア実装を担当しました。上位層との通信はFD CAN、モータドライバとの通信はClassic CANを用いました。
画像準備中. . .
モータの電流制御
目標電流に対して入力電圧を計算するPID制御器と外乱オブザーバによるモータの逆起電力補償によってモータの電流制御を実装しました。先人が実装した電流制御を改良し、上位層との通信の効率化とソースコードのリファクタリングによる軽量化・効率化を行いました。
画像準備中. . .
外乱を補償したモータの速度制御の汎用化
目標速度に対して入力電流を計算するPID制御器と外乱オブザーバによる外乱補償を組み合わせた速度制御をモータドライバ基板内に実装しました。上位層からPIDゲインと同定したモデルパラーメータを受け取り、それに応じてローカルフィードバックを行います。上位層で行っていたフィードバック制御をローカルに実装し直すことで追従性能を向上させました。
画像準備中. . .
Google Apps Script + Slack API
Google Apps ScriptとSlack APIを組み合わせたSlack Appを作成しました。学内施設の日毎の予約のために、その日の利用者から情報を収集し自動で申請するアプリケーションです。Slackのアプリ上でUIを操作するとGoogle Documentを自動で編集し、申請者全員の情報を集めて大学に自動でメールを送信します。

多重通信モージュール
学生ロボコンの会場は電波環境が劣悪です。一方で競技のルールで無線通信によってロボットを操縦することが義務付けられました。複数の電波帯域・規格で同時に通信し、最も早く情報が到達する経路を自動で選択して通信を無線化するモジュールを開発しました。
かき氷自動調理ロボット Kakigori Maker

出典「New Innovations 、かき氷の全自動調理ロボット「Kakigori Maker」を提供開始。プロントコーポレーション運営の「和カフェ Tsumugi」に導入決定。」
かき氷の盛り付けを自動化するロボットのSCARAアームの運動制御の開発を担当しました。